Firmware 刷 INAV 1.1RC2
另外補充 刷這版軟體 接收機要用PPM 模式比較好,接腳功能才會全開, 尤其是CC3D 一定要用PPM
Quick summary of main features:
- Legacy BARO, SONAR, GPS PH, GPS RTH modes are removed and replaced by ALTHOLD, POSHOLD and RTH modes
- Gyro and accelerometer FIR filtering
- Quaternion IMU logic for Level modes. More precision, less drift and faster performance
- Advanced INS/GPS position estimation for best accuracy
- Advanced accelerometer and magnetometer calibration
- Smart RTH (return to home) that would use the safe altitude to return home - avoid the trees and buildings - and land
- RTH on failsafe (radio signal loss)
- Waypoints and fully autonomous missions (work in progress)
iNav has different config settings and simply restoring old backup will result in poor performance!
Please read the docs before you go fly iNav for the first time:
Advanced accelerometer calibration
CLI variable reference
GPS Failsafe and Glitch Protection
Navigation modes
iNav on GitHub:
https://github.com/iNavFlight/inav
Documentation:
https://github.com/iNavFlight/inav/wiki
Firmware builds:
https://github.com/iNavFlight/inav/releases
===============================================================
Advanced accelerometer calibration
Accelerometer calibration is mandatory if inertial position estimation is used. Modern accelerometer sensors are accurate, but they require calibration if we want precise measurements. Sensors might be biased, gains on different axis might be different. Advanced 6-point calibration takes care of all irregularities sensor might have.
Accelerometer calibration steps
- Connect the copter to the "Configurator" software, select the "Setup" tab.
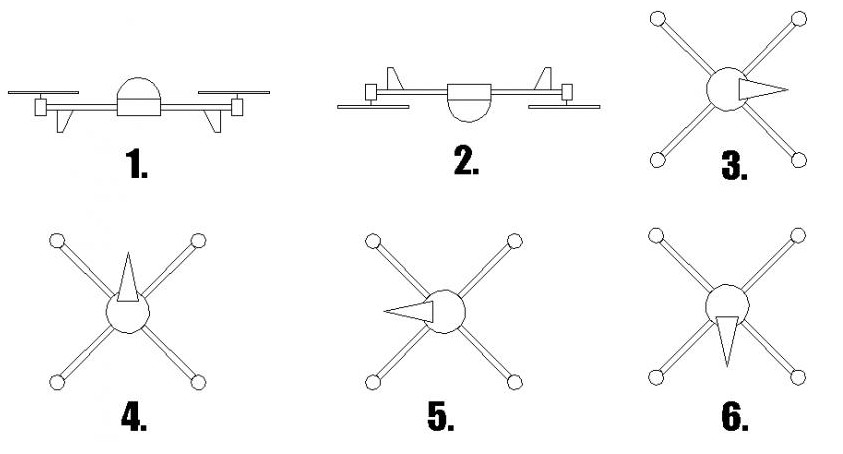
- Place copter level (pos 1) and press "Calibrate Accelerometer" button. Advanced calibration has been activated and recorded the 1-st data point.
- Place copter on all sides in sequence (pos 2-6): on its back, right side, nose up, left side, nose down. Press "Calibrate Accelerometer" button for in every position. The advanced calibration algorithm will record 2-nd to 6-th data points.
- After all 6 positions have been recorded advanced calibration will calculate offsets and gains and store them in EEPROM. Accelerometer calibration done.
- Use CLI to verify that accgain_x, accgain_y and accgain_z parameters are NOT ZERO. If they are, algorithm failed to converge, calibration failed and needs to be repeated.
There is no need to place copter perfectly aligned, the algorithm does not care about exact positions as long as they are close to 90 degree apart and copter is stationary in every position.
Level calibration
Proper accelerometer calibration does not guarantee copter being level. Chip might be misaligned on board or the board itself might be mounted at some tiny angle. For level flight and navigation features to work you need to trim the firmware to level flight using "Board Alignment" on the "Configuration" tab.
NOTE! Unlike in "official" Cleanflight firmware board alignment angles are set in degrees*10, so if you need to trim your board 1.5 degrees you should enter "15".
NOTE2! To keep things compatible with official Configurator, angles more than 36 deg and less than -18 deg can only be set through CLI parameters: align_board_pitch, align_board_roll andalign_board_yaw.
This applies to mounting the flight controller at 90 degree to keep USB port accessible. You have to set align_board_yaw=900 from CLI.
Backup and restore the settings
To avoid going through full calibration after resetting the configuration new CLI settings are introduced to get and set accelerometer offsets and gains: acczero_x, acczero_y, acczero_z,accgain_x, accgain_y, accgain_z.
iNav CLI variables
GPS Failsafe and Glitch Protection
Ref : http://www.rcgroups.com/forums/showthread.php?t=2495732
沒有留言:
張貼留言